本帖最后由 casper 于 2013-10-29 02:05 编辑
科技世界
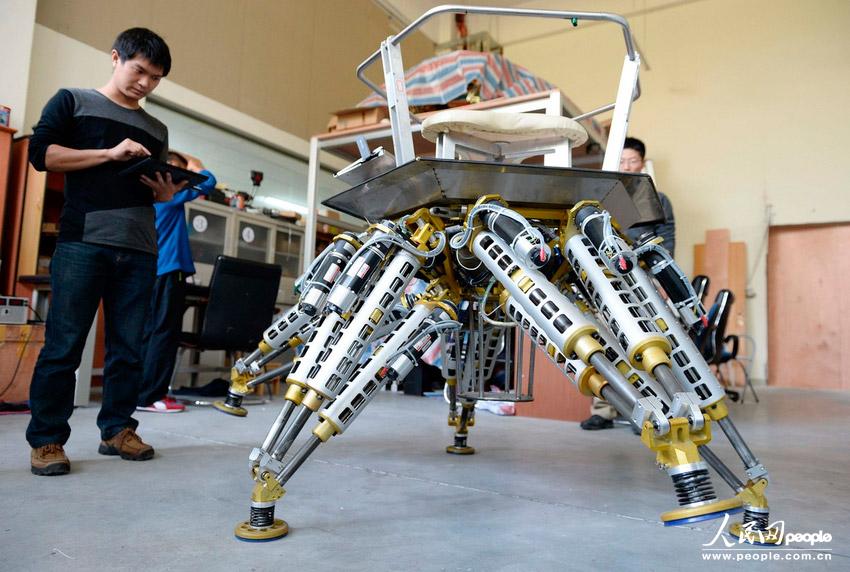
28日,由上海交通大学研发的具有自主知识产权的“六爪章鱼”救援机器人进行了载人试验。该“六爪章鱼”机器人高约1米,最大伸展尺寸可达2×2米,由18个电机驱动,通过远程遥控使用,能够灵活地沿各个方向稳定行走,速度可达1.2千米/小时,负重达200公斤。
10月28日,由上海交通大学研发的具有完全自主知识产权的“六爪章鱼”救援机器人进行负重试验。
“六爪章鱼”使命重大
“六爪章鱼”可不仅仅是外形引人注目,由上海交通大学机械与动力学院重装所研制的这种救援机器人,具有意义重大的使命——在核电站等核辐射环境下进行紧急救灾。它具备深入复杂危险环境的工作能力,可在化学污染、水下和火灾等环境下完成探测、搜索和救援等任务。
上海交通大学机械与动力工程学院高峰教授介绍,核电救灾机器人在核辐射环境下工作需要有很好的辐射防护,否则电子设备会很快受损失效,而有效的辐射防护材料是沉重的铅;同时,救灾机器人还需要携带检测设备进入发生事故的核电站厂区,探测发生事故后核电站内部情况,兼搬运管道、拧动阀门、清理事故现场……这些不但考验机器人的机动能力、平衡控制能力,更需要考验机器人的承载能力。
围绕这些技术难题,高峰教授团队开发了这款六足步行机器人:特殊的腿部设计配合18个驱动单元能显著提高机器人的承载能力,使其能负重150公斤。它可以充当一个稳固的移动工作平台执行搬运打孔等作业,也可自行完成拧动阀门、清理事故现场等工作。它可以往任意方向快速运动,拥有很强的机动性、避障能力和稳定性和有较强的抗干扰能力,准确的执行操作者的指令。拥有了这些能力,章鱼机器人便能深入灾区,代替人们精确地完成最危险的工作。采用其它相应的防护后,它还能在水下环境中作业,以及在火灾现场或有毒环境中完成救灾任务。
“六爪章鱼”机器人高约1米,最大伸展尺寸可达2×2米,由18个电机驱动,通过远程遥控使用。
高峰教授团队长期从事仿生机器人的研究。与轮式、履带式机器人相比,仿生步行机器人在灾害现场具有更优越的机动性和越障能力。
在国家“863计划”主题项目“高性能四足仿生机器人” 和“973计划”项目“核电站紧急救灾机器人的基础科学问题研究”的资助下,高峰教授团队成功研发了两足、四足和六足步行机器人,在并联仿生机构、高功率密度驱动、多轴伺服控制等技术领域取得大量重要成果。
今年5月的上海科技节上,小朋友体验六足机器人。
会跳舞的“智慧小象”
除了六足步行机器人“六爪章鱼”外,上海交大研制的四足机器人“智慧小象”此前也曾在2012年上海工博会等多个场合公开亮相。与“六爪章鱼”相比,“智慧小象”轻巧灵活,二者配合可适应复杂多样的工作环境。
2012年11月7日,在上海举行的第14届中国国际工业博览会上,“智慧小象”机器人与美女骑手在现场大跳“江南style”,成为当仁不让的明星。
2012年上海工博会,美女与机器人大跳“江南style”
据介绍,“智慧小象”长约1.2米,宽约0.6米,高约1米,“体重”约130公斤。从外形上看,“小象”的体型比较“敦实”,“四肢”健壮有力,走起来一步一个脚印,神态“活灵活现”,如果再加两根长长的象牙,俨然就是一头机动灵敏的“小象”。
据介绍,“智慧小象”可以自带动力源,无需凭借外接动力线缆和通讯线缆,“驮”至少100公斤的重物,一小时跑4公里,而且腿部可做至少12个自由变换,最大行走坡度超过10度。同时,为防止摔倒,“小象”身上装有力觉测量与实时感知信息反馈系统,实现了“肌体”的动态平衡与稳定控制,使“小象”具备抗惯性力扰动和抗外载荷冲击扰动的平衡自恢复能力。因此,假如在路上被大石头拌了一下,“小象”可以瞬间恢复平衡。
“智慧小象”和“六爪章鱼”的亮相,标志着我国仿生机器人技术迈入国际先进行列。
| 





 发表于 2013-10-29 02:03:20
发表于 2013-10-29 02:03:20




 收藏
收藏 分享
分享