|
2018-04-03 09:18人类/媒体/操作系统

credit:Camera Culture
来源:CNBC
编译:肖琴
【新智元导读】麻省理工学院媒体实验室的研究人员开发了一种新的成像系统,利用SPAD相机和新的算法,可以测量被雾遮挡的物体的距离。在实验中,该系统的表现比人类的视觉更好,这对于自动驾驶汽车来说是一个巨大的突破。

麻省理工学院媒体实验室的研究人员开发了一种新的成像系统,可以测量被雾遮挡的物体的距离,而人的视线很难看穿雾气。
他们的目标是将该技术整合到自动驾驶汽车中,这样,即使在恶劣天气下,车辆也能避开障碍物。
这个成像传感系统使用SPAD(单光子雪崩二极管)相机,可以向物体发射短时激光脉冲,然后计算光线反弹需要多长时间。雾通常会散射激光,这使得自动驾驶车辆在雾天难以驾驶。
但研究人员开发了一种算法,可以在散射光中找到模式,以计算出距离。他们发现,无论雾有多厚,散射激光的到达时间总是遵循一个非常具体的分布模式。摄像机会计算每万亿分之一秒回到传感器的光子数量,当这些结果绘制成图时,系统可以应用特定的数学滤波器来揭示数据尖峰,从而揭示隐藏在雾中的实际物体。
他们提出的方法是基于估计雾特性(背景)的概率算法,然后从测量结果中减去背景,使用目标反射率和深度来恢复目标的信号光子。
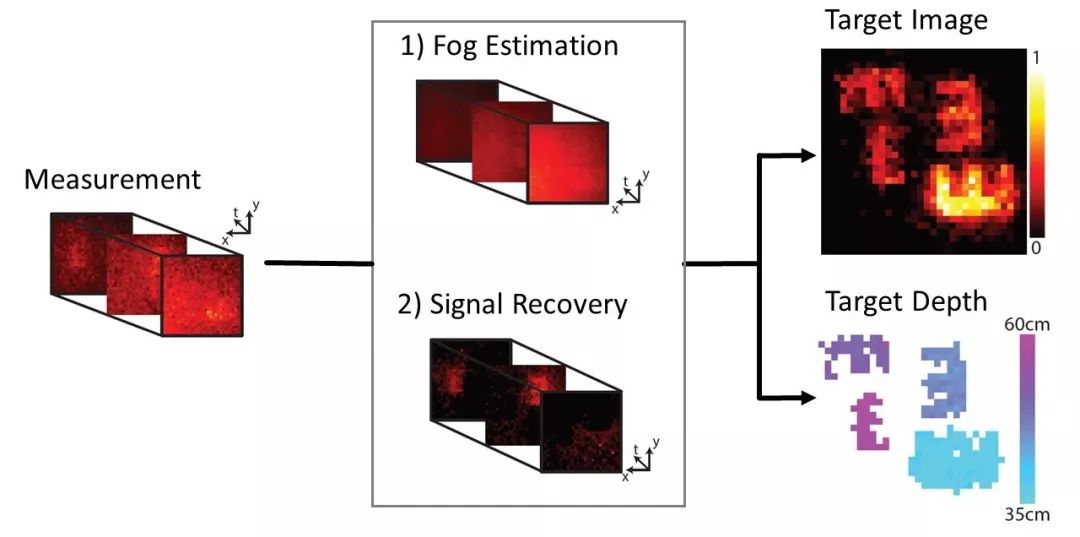
算法概述
他们提出的模型支持多种雾密度,并且能够在不均匀和动态的雾中工作。雾模型直接根据测量结果进行估计,而无需先验知识。
Source: Guy Satat, MIT Media Lab's Camera Culture Group
应用场景:
在充满挑战的天气中进行自主驾驶或辅助驾驶。
飞机和直升机在浓雾环境中起飞、着陆和低空飞行。
列车在恶劣天气条件下以正常速度行驶。
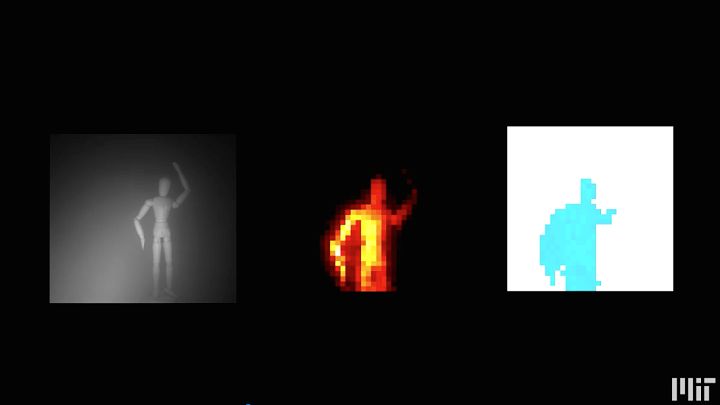
在MIT媒体实验室的Camera Culture团队,研究人员在实验环境测试了该系统,其中的雾比现实世界中汽车所面临的雾更浓密。该系统比人类的视觉表现更好,而大多数成像系统的表现更差。与人类驾驶员处理雾气一样好的导航系统,对于自动驾驶汽车来说是一个巨大的突破
| 





 发表于 2018-4-3 02:46:42
发表于 2018-4-3 02:46:42

 收藏
收藏 分享
分享